网站广告、商务合作咨询电话
18627148925
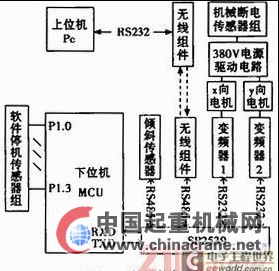
整个系统按照检测、控制、通信、执行的顺序划分成四大块,各部分的工作如下:
检测部分:主要包括倾角和接近传感器等硬件。其中前者用于获得吊具的俯仰角和横滚角并传送给SP2539的子串口,为下位机判断电机转动方向,计算移动行程提供依据。后者分为软件停机传感器组和机械断电传感器组,采用双重制动策略,保障吊具在使用过程中平稳调平和安全使用。
控制部分:单片机嵌入式系统是控制机构的核心部件,首先接收检测部分的输出值,包括吊具的实时姿态、软件停机传感器组状态,同时调用子程序,处理输入信号并给出动作信号给1、2号变频器,使x,y向电机遵循指令进行动作。最后,单片机还需要和上位机设备进行交流,方便操作人员随时掌握系统的状态。
通信部分:这部分解决单片机分别与检测机构、上位机以及执行机构的信息传输。具体的讲,主要是指单片机与倾角和接近传感器、上位机调平控制指令、1、2号变频器输出频率、角度显示以及SP2539串口扩展系统之间的信息传输。
执行部分:接收单片机的输出信号,并按照上位机自动、手动调平指令调节1、2号变频器输出,从而驱动x、y向电机转动方向,促使主吊点偏移完成调平工作。无线组件将上位机和下位机无缝连接,使得上位机的控制和数据获取更加实时。
本文《自动平衡吊具控制系统组成介绍》由 中国起重机网 发布,未经许可严谨转载,如需转载请注明来源:http://www.qizhongji123.com/qzjs/1330.html。
上一篇:MAF型桥式行车四绳抓斗钢丝绳绕法及工作原理
下一篇:防坠器定义、工作原理及结构